
It is often useful to create a virtual model of an object in the collision model to avoid a collision with the environment or when using a custom EOAT.
Note: Adding safety walls, pallet walls or a conveyor to the model should be achieved using other existing methods. It is also possible to change the default gripper representation with a custom design gripper using the guide available here
Knowledge
The following script command will allow adding a collision box to the model.
Script declaration
rq_register_bounding_box(referential, box_position, box_dimensions)
Referential (type: int)
Three useful referentials are:
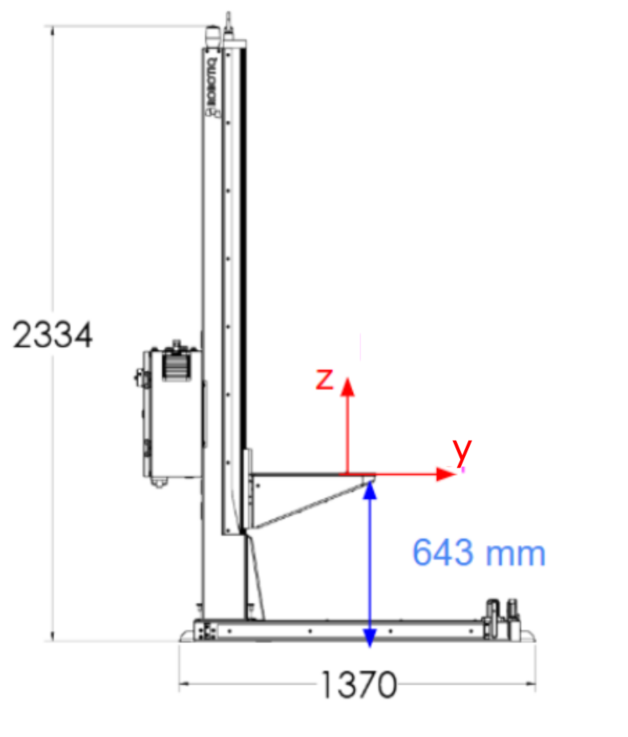
0 = palletizer base (AX series)
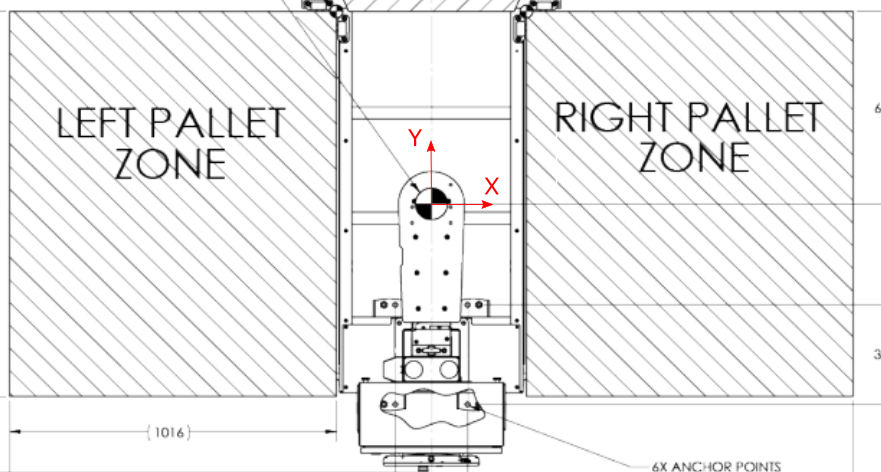
3 = robot base 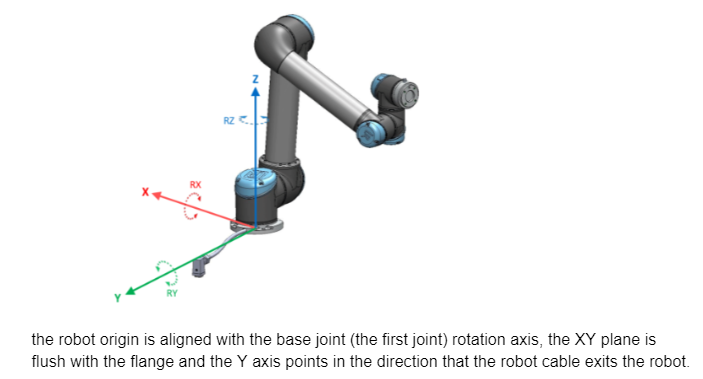
9 = robot tool flange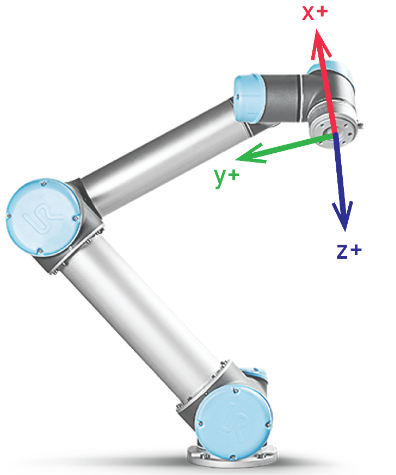
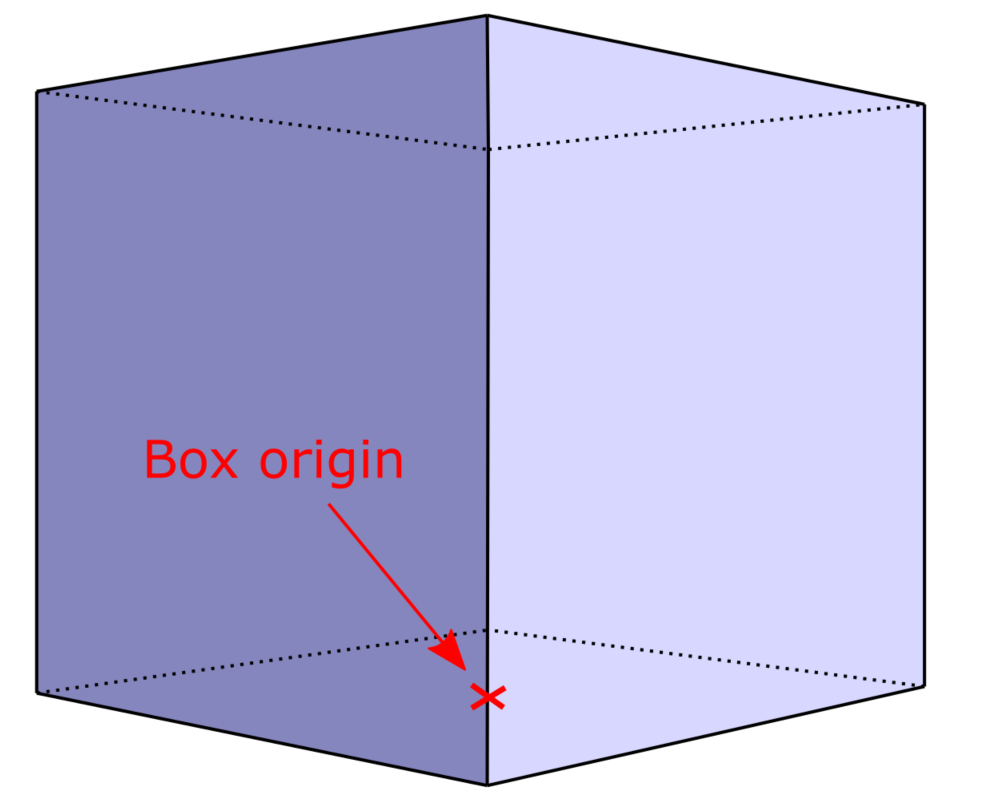
Box position (type : pose)
The box position is written in the p[X,Y,Z,Rx,Ry,Rz] form. The box origin is the center of the bottom of the box. Of course, what is the bottom and the top is relative to the referential frame.
- X, Y and Z are in meters.
- Rx, Ry and Rz, in radians.
Box dimensions (type : list)
Box dimensions are presented in the [X,Y,Z] form and must be expressed in accordance to the selected reference frame.
X, Y and Z are expressed in meters.
Example with boxes added in the tool reference frame
Here we need to avoid collisions with a custom tool with an irregular shape.
Two script commands are added to the BeforeStart sequence of the program: 
Here is a view of the resulting collision model, which includes the auto generated boxes of the extension bracket and the gripper (this one is on top, aligned with the gripped box, and slightly smaller). 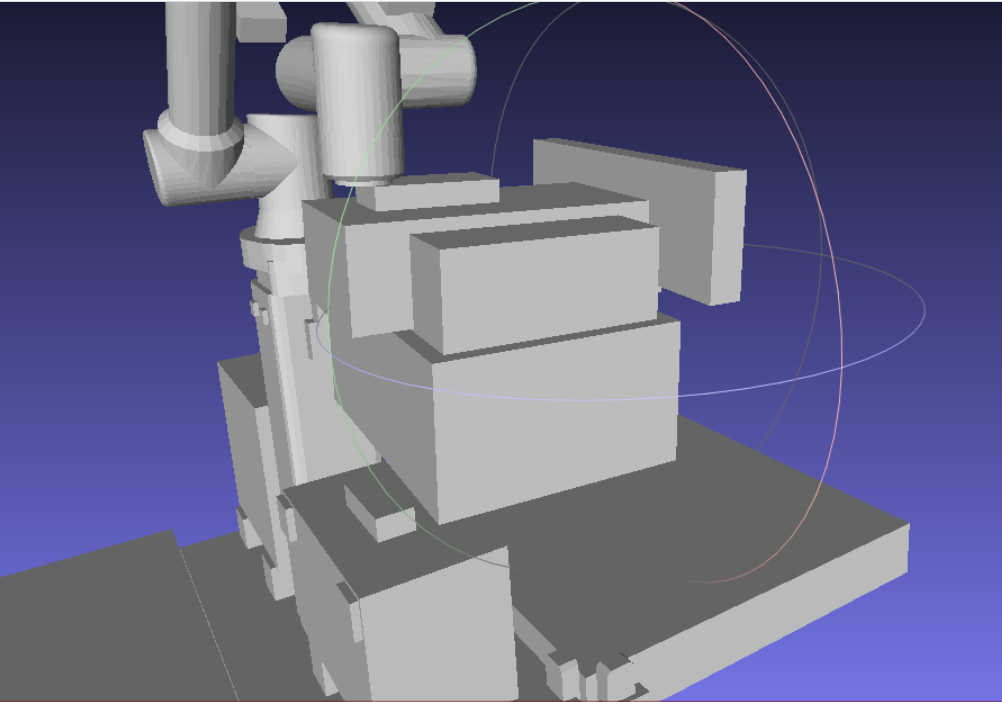
Link to visualize the collision model : link