

Welding is one of the first manufacturing applications to have been automated in industry. Its complexity and the fact that it is a hazardous job has made it the perfect application to give to industrial robots. Since this time, a lot of other robotic applications have been robotized. In some previous posts, we have talked to you about how vision systems improve actual robotic applications by giving eyes to robot arms. Well, robotic welding also follows this trend, since through the help of vision, welding applications can be improved for even better results.
Seam Finding
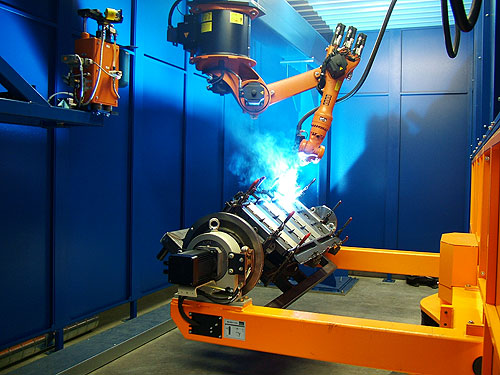
![]() This system allows the robot to precisely locate the joint that will be welded using the two parts as references. Different techniques exist to locate the joint.
This system allows the robot to precisely locate the joint that will be welded using the two parts as references. Different techniques exist to locate the joint.
The first one needs contact with the part in order to locate the joint; it is called tactile sensing. It uses the welding wire or another wire to touch the part and determine the best position for the weld. For some kinds of welds such as lap welds, it can be used only with material thicker than 3 mm.
The second technique uses a laser point to locate the work surface. This technique is non-contact and significantly faster. This technique can be used with thinner materials than with touch sensing.
The third technique uses laser cameras. They project a laser line which detects both walls at the same time. Moreover, they can reduce cycle time and provide data about joint gap.
Seam Tracking
This system is meant to track the weld position, in real time, during welding. It provides better quality welds, better path speed, optimal weld path and reduced cycle time. Moreover, it can simplify the programming, since the robot will be guided by the system.
This sensing technology looks like the one used for seam finding. It can use tactical sensing, as well as optical sensing.
Tactical sensing has the advantage of not being sensitive to weld splatter or extraneous light. It is the simplest to use. The system will detect if there is any deviation between the edge it touches and the programmed path. The welding wire or a separate wire can be use as a sensor.
Optical tracking moves over the seam, in advance, to detect any deviation from the programmed path. It often uses lasers or cameras.
Control
When a deviation is detected, the robot has to compensate for this deviation. To do so, there are two kinds of control scheme: robot-controlled seam tracking and adaptive seam tracking.
For the first method (robot-controlled seam tracking), the robot controller will receive the data and send the corrections to the robot. Its advantages are to have a reduced device overhead and a smaller shape for the processing head.

For the second one (adaptive seam tracking), the robot is mounted with an autonomous processing head that can be programmed independently. So, when a deviation is detected, the data will be sent to this autonomous device that will then determine the compensation. This control scheme is independent from the robot controller and can react fast.

These tools can greatly improve your welding application, so that it always produces an optimal weld each time. Ask your robotic welding integrator about which solution would best suit your production parameters.
---
When talking about robotic welding, manual welders are a great asset for companies due to their welding knowledge and expertise. However, when it comes time to automate the welding process, they might become overwhelmed with all the programming. Robotiq has consider this and developed an intuitive solution for the programming required with robotic welding. Kinetiq Teaching is a device that helps people, with no in-depth knowledge of programming, set up their welding robot real fast. Watch the video to see how it works!



Leave a comment