

 When writing with a pencil, you hold the tool at a specific angle of approach to the paper, but can you figure out at which axis, angle, and plane, the pencil is actually being held? The change in approach angle when writing with a pencil is similar to coordinating multiple axis movements for a robotic welding torch. It is always more intuitive to hold the tool than to mathematically note its position in free space.
When writing with a pencil, you hold the tool at a specific angle of approach to the paper, but can you figure out at which axis, angle, and plane, the pencil is actually being held? The change in approach angle when writing with a pencil is similar to coordinating multiple axis movements for a robotic welding torch. It is always more intuitive to hold the tool than to mathematically note its position in free space.
Establishing multi-axis movements for robotic welders have been difficult in the past due to this: having to translate a natural motion (natural motion for a welder, I mean) into a mathematical and abstract motion. Now the programming of this motion is becoming more and more intuitive. Similar to teaching a child how to write by guiding their hand across a piece of paper, the robot can now be taught where to place its welding tip and remember that position, resulting in repeatable welds.
Teaching robotic welders with your hands
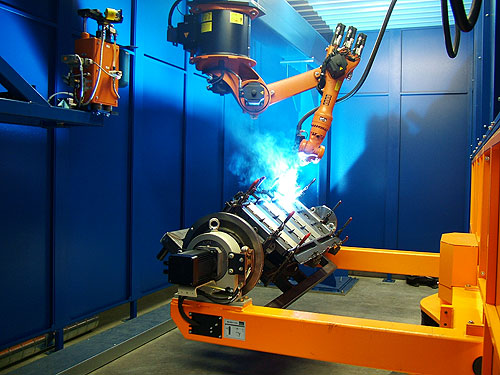
This is exactly what we are working on at Robotiq. The idea is to equip an already existing robot welder with a device which allows any human welder or machinist the ability to guide and record the position of the robot end-effector (or welding tip) with his or her hands. So we would teach a robot a welding task exactly like we do when we teach kids to write. We have called this new application Kinetiq Teaching. As you can see in the following video this new device enables an end user to; move the robot along different axes, bring the welding torch to a specific point; select welding specifications; record a point and then move to another point. Recording the welding point by point and having the possibility to move the robot with your own hands makes programming the robotic welder a lot easier and much more accessible to everyone, even people who do not have an in-dept knowledge in programming.
Learn more about this new way to program a robotic welder on our website: Kinetiq Teaching - Click here



Leave a comment