This article explains the function of the two parallel locking pins found on each finger of the Robotiq 2F-85 and 2F-140 grippers. Understanding their role helps ensure proper installation and secure operation when replacing or adjusting finger tips.
1. Purpose of the Locking Pins
-
The 2F85 and 2F140 grippers are designed with adaptive fingers that conform to a variety of part shapes.
-
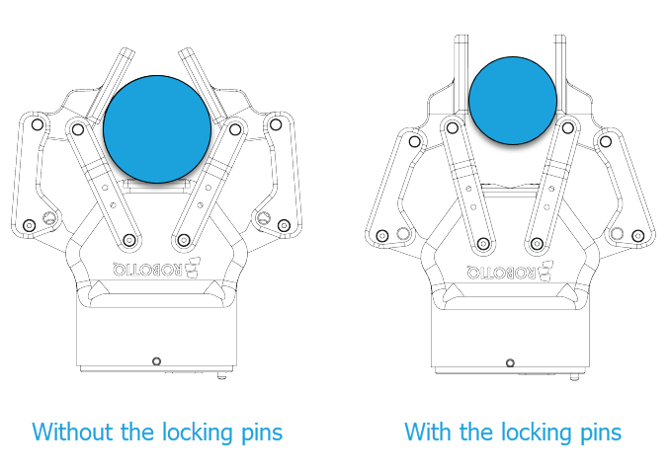
The two parallel locking pins allow users to mechanically lock the fingers into a parallel configuration.
-
This locking ensures the fingers move symmetrically and stay parallel throughout the opening/closing motion.
-
Ideal for applications that require high precision or symmetrical gripping forces.
2. When to Use the Locking Pins
-
Use the pins when you need to:
-
Ensure parallel closing on flat or symmetrical parts
-
Avoid any adaptive or angled movement
-
Improve repeatability in high-precision tasks
-
-
Common in collaborative machine tending, bin picking, or tight-fitting part handling.
3. How to Install the Pins
-
Locate the designated holes on each gripper finger.
-
Insert the pins to lock the finger linkages in place.
-
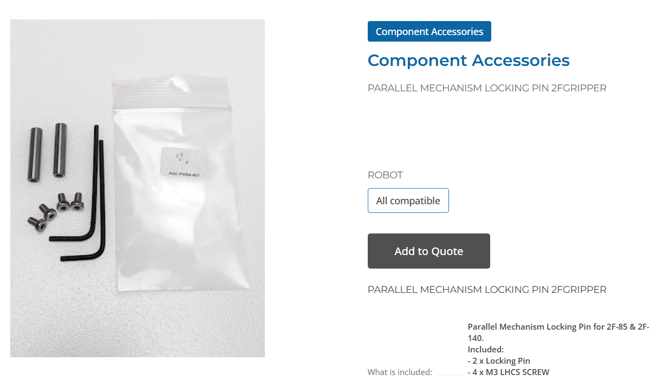
Screw the two M3 screw on it by using the key.

4. Ordering Information
-
The locking pins are sold as a kit.
-
SKU:
-
Gripper Generation Serial Number Format SKU C3 (legacy) C-3XXXX AGC-PARA-KIT-002 C4 (current) C-4XXXX AGC-PARA-KIT - Contact Robotiq or your distributor to order this accessory.
-
Conclusion
The locking pins are essential for safe and reliable gripper performance. Always handle them with care when servicing the fingertips. For more information, refer to your gripper’s user manual or Robotiq Support.
Updated
June 2026