Here is a E-Learning Video of the Multipoint Path : link
This article explains the difference between the Line and Curve motion types in a Multipoint Path. Choosing the right motion type helps ensure your robot follows the intended path efficiently and safely.
Motion Type Overview
When using the Multipoint Path node, you can choose between two motion types:
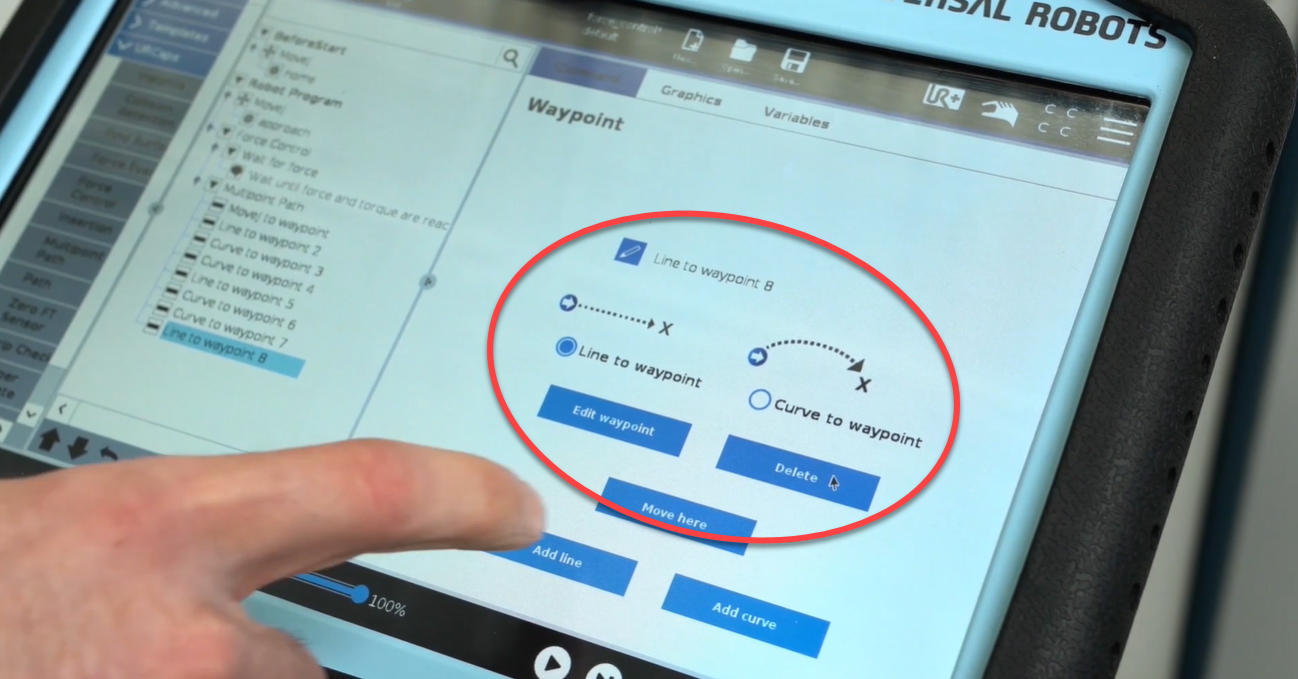
1. Line
-
The robot moves in a straight line between each waypoint.
-
At sharp angles, the robot slows down or briefly stops to maintain accuracy.
-
Ideal when precise cornering or accurate waypoint tracking is critical.
Use Line motion when:
-
You need to follow exact waypoints.
-
Precise movement between points is more important than speed.
-
The path involves sharp changes in direction.
-
2. Curve
-
The robot creates a smooth, continuous path between waypoints.
-
It does not stop at each waypoint, leading to faster execution.
-
It may slightly deviate from exact waypoints to maintain smoothness.
Use Curve motion when:
-
You want fluid motion without stops.
-
Slight deviation from waypoints is acceptable.
-
The path is gradual and flowing, such as in painting or polishing.
-
Conclusion
Choose Line motion for high accuracy and sharp transitions, or Curve motion for speed and continuous flow. Understanding these options helps you optimize robot path planning in applications like deburring, gluing, or inspection.
Knowledge
The difference between a Multipoint Path Line or Curve is:
- In Line, the robot will draw a straight line between the two points and pass through the end points
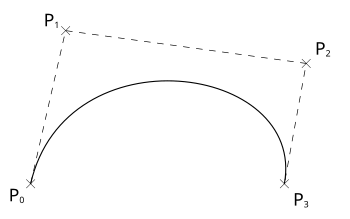
- In Curve, the robot will also draw a straight line between the two points but will not necessarily pass through the end points. The Curve of the Multipoint Path is a Bezier curve as the picture below:
You can find a video to see the difference: "DifferencebetweenCurveandLine.mp4": link
The first movement is done in Line Movement so the robot is going to each point. But the second movement is done in Curve Movement so the robot is not going to the points, it smoothes the trajectory.