Context
For some palletizing applications, it is possible to have the same boxes, while the weight of the boxes might be different.
there is different methods to tackle this.
Methods 1 : using force sensor
Methods 2: using external signal
Methods 1 : using force sensor
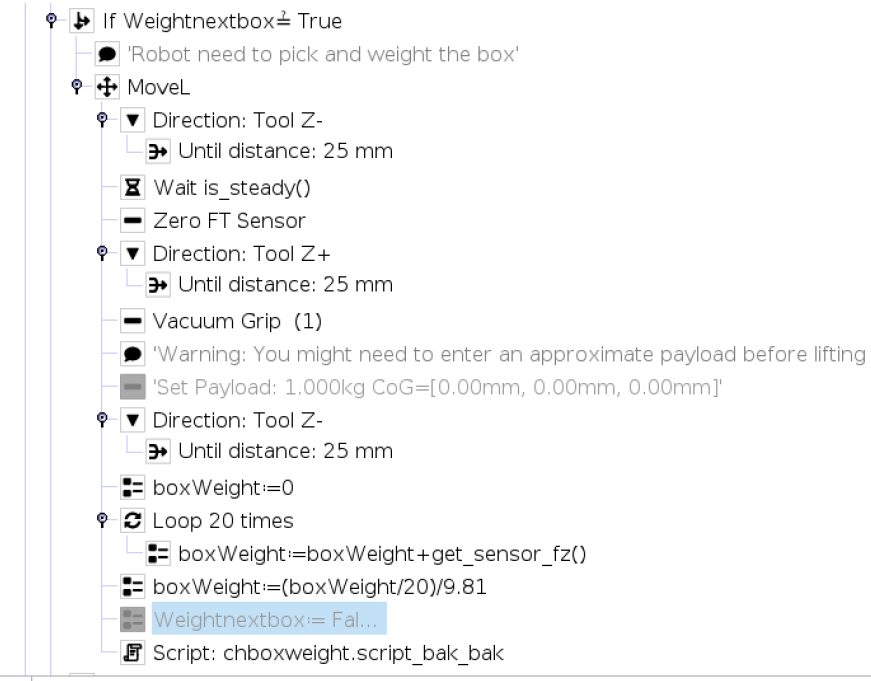
The following describes how to use the palletizing solution with variable box weight using the program template available here. The robot will weigh the box after picking it up and set the payload accordingly.
The Before Start section of the program initialized variables that will be used within the program. The Weightnextbox variable is set to True so the robot will weigh the next box.
Weightnextbox variableThe robot will then pick the box, and weigh it and the script will then calculate and set the proper payload and CoG. The Weightnextbox:= False can be suppressed if you'd like to weigh only the first box of the pallet.
Methods 2 : Using external Signal
For some palletizing applications, it is possible to have the same boxes, while the weight of the boxes might be different.
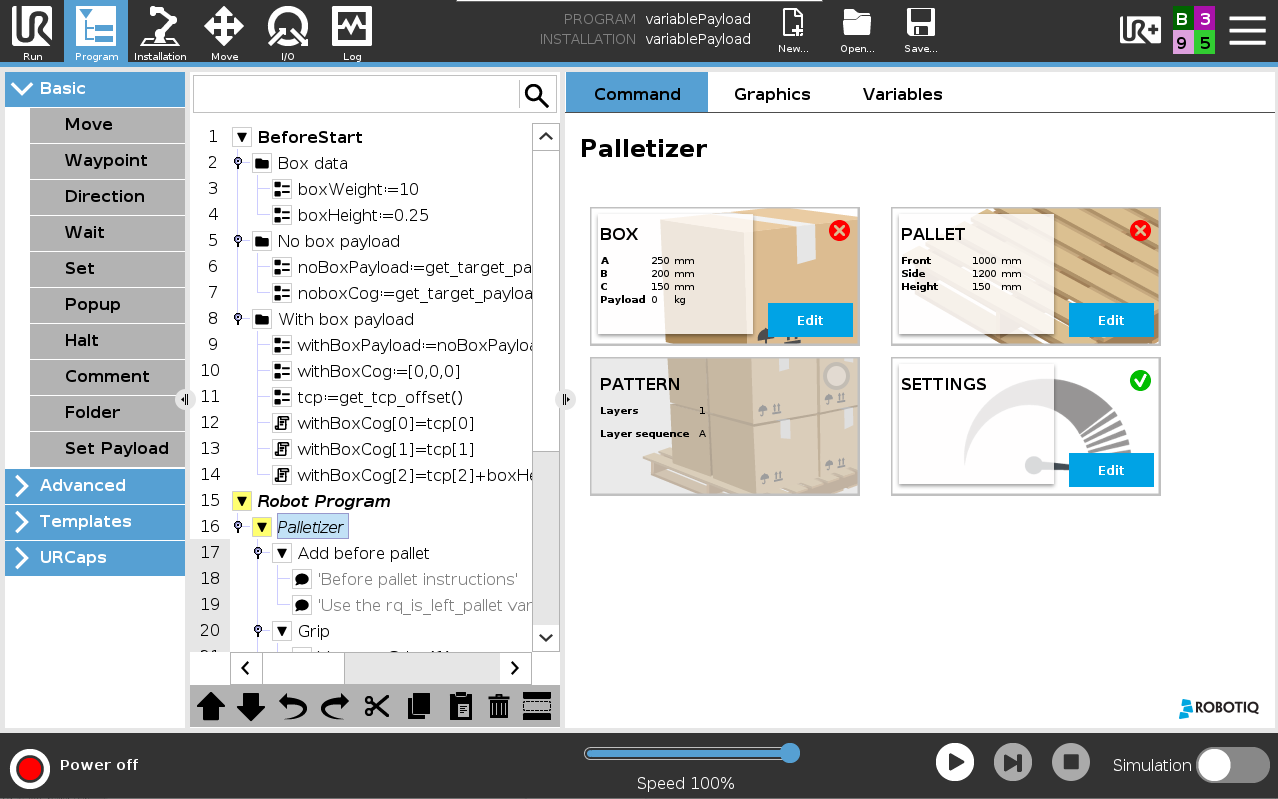
The following describes how to use the palletizing solution with variable box weight .
It is possible to defined a box payload at each pick and release like this :
-
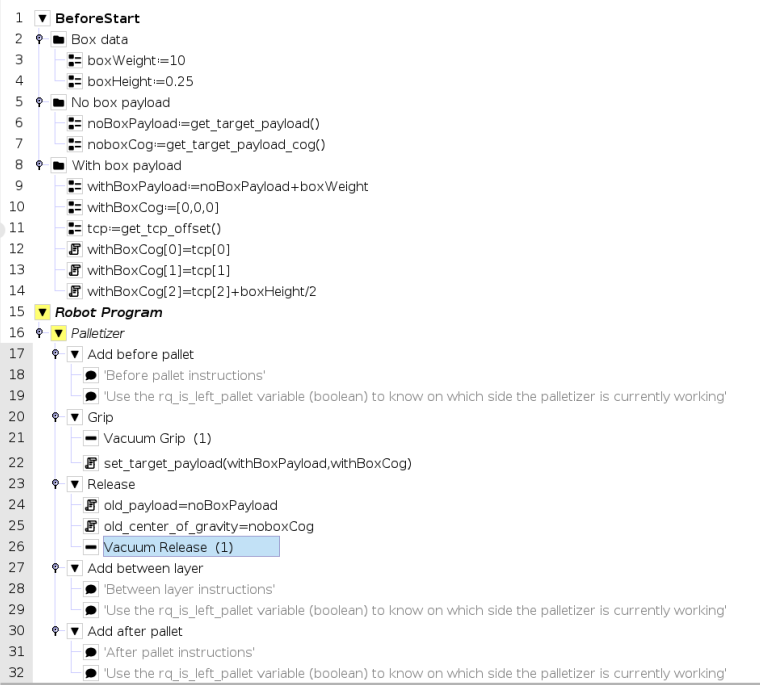
Box weight to set to 0 in the palletizing node
-
After Grip action (vacuum on) use the function : set_target_payload() to change payload and COG (gripper+box).
-
Before Release ( vacuum off) change variable old_payload and old_center_of_gravity with payload et le COG without box.
here is a program template to inspire: https://share.robotiq.com/public/15db0