Context
In some applications, you may need your robot to approach a part gradually and only stop when it is actually detected by the vacuum gripper. The standard “Wait until object is detected” setting in the Vacuum Grip node causes the robot to pause before reaching the part, which may not be ideal for dynamic or uncertain pick locations.
This article explains how to bypass the default behavior using an IF node with continuous evaluation and robot movement logic—so the robot moves toward the part and stops automatically when the part is detected.
1. Prepare the Vacuum Grip Node
-
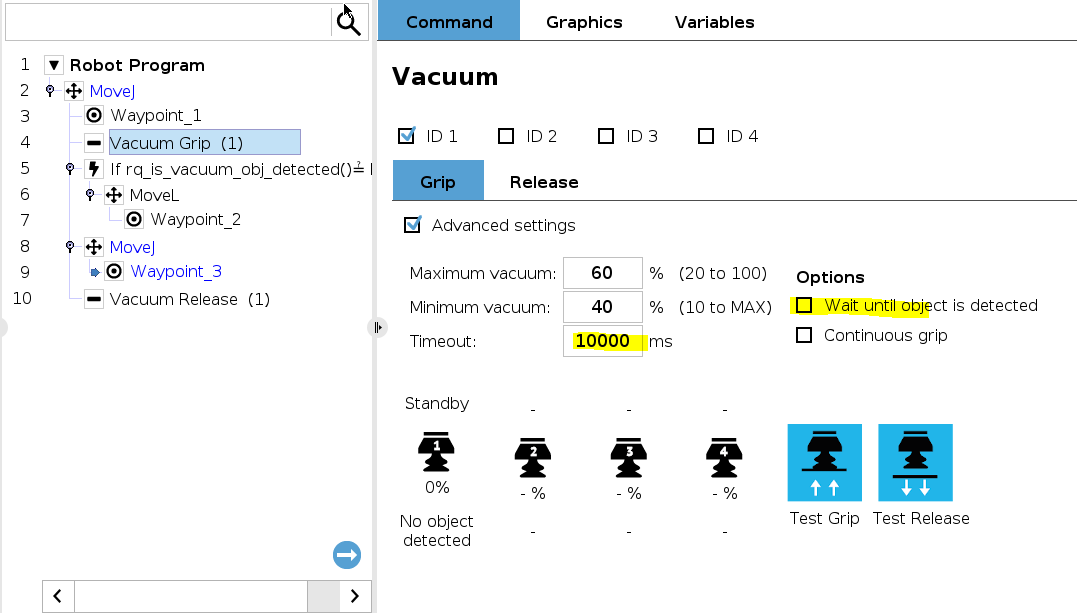
Insert a Vacuum Grip node into your program.
-
Uncheck the box labeled “Wait until object is detected.”
-
Set a timeout long enough to cover the full approach (e.g., 3–5 seconds depending on distance and speed).
2. Define Key Waypoints
Create three waypoints in your program:
-
Waypoint_1 – Start of the approach (e.g., 20 mm above the part)
-
Waypoint_2 – End of the approach (e.g., just before contacting the part)
-
Waypoint_3 – Retraction point after detection
3. Add Continuous Detection Logic
Use an IF node with “Check Expression Continuously” enabled:
-
In the expression field, enter the script function used to detect the object.
Example:rq_is_object_detected() == False -
Inside the IF block, insert a moveL command toward Waypoint_2.
This means:
While the gripper does not detect a part, keep moving toward the part.


4. Motion Settings for Safety
Set a slow speed for the moveL toward Waypoint_2 to avoid damage in case the gripper fails to detect or the part is misaligned:
-
Speed: ~10–30 mm/s
-
Acceleration: ~50–100 mm/s²
5. After Detection: Retract or Proceed
Once the object is detected:
-
The IF condition becomes false, and the robot exits the approach loop.
-
Continue the program by moving to Waypoint_3 or starting the place sequence.
6. Example Program Flow
Conclusion
Using continuous detection logic allows your robot to approach parts dynamically and stop precisely when the vacuum gripper confirms suction. This method increases flexibility and performance, especially for applications involving variable part height or uncertain positions.