Context
Robotiq’s FT‑300 and FT‑300S sensors provide valuable force and torque feedback. However, they are not metrological instruments. This article explains how sensor readings behave over time, what level of accuracy you can expect, and how to get the best results using Copilot or other software.
Important Guidelines when Using the FT-300 Sensor, FT-300-S Sensor, and Copilot Software
The Robotiq FT-300 sensor (or Copilot software) should not be used to precisely measure quantities. The customer needs to see the sensor as a baseline for applied force in an application. It should be used in the context of an application to detect events or control forces with high repeatability.
This means that the FT-300 sensor is not a precise tool. It is a repeatable tool that should be used to give a sense of touch to the robot and not to weigh objects precisely.
The signal noise* is the limiting factor for the sensor's precision. For the FT-300, the signal noise defined in the signal specifications is the standard deviation of each data (Fx, Fy, Fz, Mx, My, Mz) over 1 second. To use that signal noise information, three times the standard deviation given must be used. According to the normal distribution, three times the standard deviation will cover almost all values possible (99.7%).
*Signal noise is the standard deviation of the signal measured over a period of one (1) second.
Our sensor is a Repeatability tool. This means that the accuracy (especially at lower forces) can be off, but the "bad measurement" will always be the same. Therefore, the accuracy can be compensated by taking the force wanted and compensating with the force measured. (See green square below)
In the case of application, it is normal that the measurement is off after a long period. This is why we always recommend applying a "zero sensor" before each measurement. The measured value will then be in reference to the zero sensor function.
The only thing that the Zero sensor button does is to take the actual values of the sensor read at this moment and shift them to 0 temporarily. The sensor will still continue to drift from this point so this is why a Zero sensor must be done as often as possible for repeatable values (sometimes as much as every few seconds/minutes depending on the application).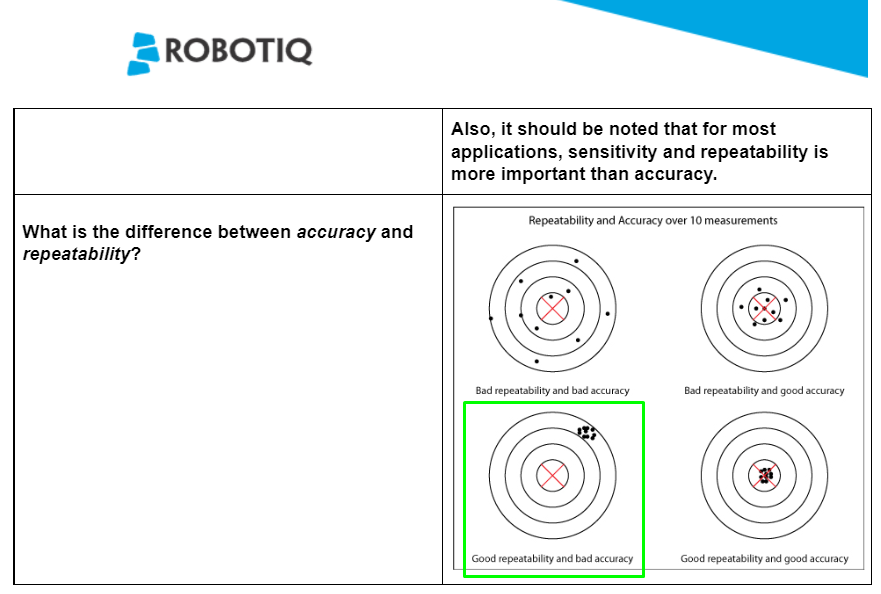
Also, it is normal for the sensor to see some form of "cross-talk" between the different forces and torque. This is related to the way the sensor is designed and working.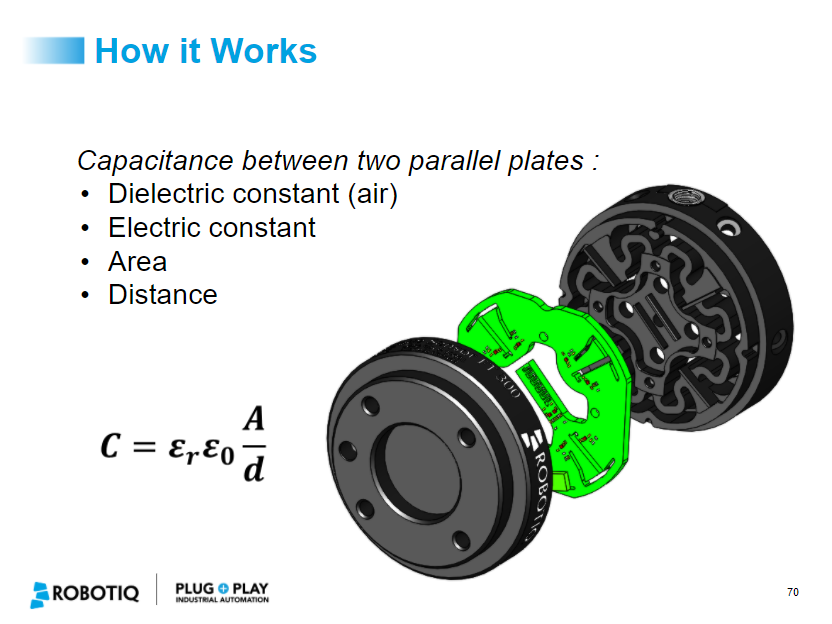
One of the advantages of such a design is that the sensor is very stiff. However, when a force is applied, the whole sensor is "moving" and forces can be detected in other axes as well.
We compensate for this and evaluate the force applied in every direction, but is very difficult to evaluate accurately the forces for all axes at the same time.
This behavior will have minimal effect in most applications unless you are looking to get a precise measurement of forces and torque overall axis simultaneously, for which the sensor isn't recommended.
Again, the sensor is not a highly accurate device, but it is highly repeatable. Depending on your application, you can do your own"calibration" for a specific axis/force range by comparing it to a calibrated measurement machine and the result will be very consistent.
Here is a table of the specifications of the FT-300S :

Best practice
The FT300S is designed to perform relative force and torque measurement on a short period of time with similar orientation.
The specification in the manual states that, for a duration of 1s, the standard deviation FT300S Fz force is 0.1N and relative force measurement are recommended from 1N.
This is correct but there are some specificities:
- the force measured by the FT300S will offset with time and environmental condition. After 5 to 10 min it is possible to observe an offset of 10-20N.
- if you apply strong force on the FT300S and then leave the FT300S at rest, some inside deformation may remain. Those remaining deformation can cause on offset of about 3N.
- changing the orientation of the sensor can cause some offset. This offset is mainly cause by the payload attached to the FT300S (which is compensated by Force Copilot software on Universal Robot) but there si also an offset which come from the FT300S itself. This offset can be of more than 5N.
Knowing that it is recommended to:
- use the FT300S on short period of time and right after setting all readings to zero. If you are doing a long finishing application, it may be good to split it in several sections.
- use the FT300S for relative force measurement with similar orientation.
Conclusion
The FT‑300 and FT‑300S are reliable tools for detecting contact, applying controlled force, and monitoring events — when used with care. Understand their limitations, especially regarding noise, drift, and orientation sensitivity. With frequent zeroing and consistent use, you can ensure repeatable and robust force sensing in your application.