Context
When you want to control the gripper on a non UR Robot, you will need to control the gripper by using the registers.
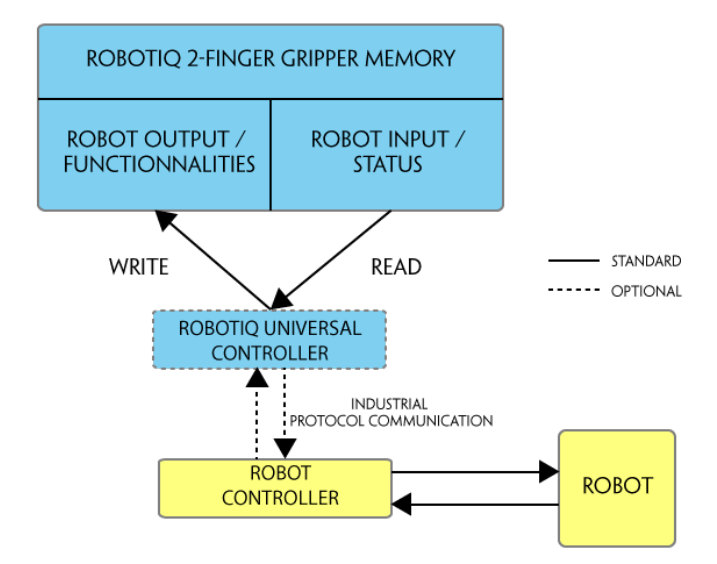
Our grippers are Modbus RTU slave units with a default ID of 9. If your robot doesn't use Modbus RTU as a communication protocol, you will need a Universal Controller configured in the communication protocol that your robot uses. Here are the different configurations available:
- CANopen (UNI-CTR-001-CANO)
- DeviceNet (UNI-CTR-001-DNET)
- EtherCAT (UNI-CTR-001-ECAT)
- Ethernet/IP (UNI-CTR-001-ENIP)
- Modbus TCP (UNI-CTR-001-MTCP)
- ProfiNET (UNI-CTR-001-PNET)
We also have different EDS files:
Knowledge
Gripper control is achieved by writing values to specific output registers and monitoring input registers for feedback.
-
Output Registers (write to these):
-
Activation Request
-
Position Request
-
Speed & Force
-
-
Input Registers (read from these):
-
Gripper Status
-
Object Detection
-
Position Feedback
-
Refer to the product documentation for a full list of register addresses and data formats. You can find it here: https://robotiq.com/support
Here is the logic control of the gripper :
In the section Registers, you will find the register mapping :
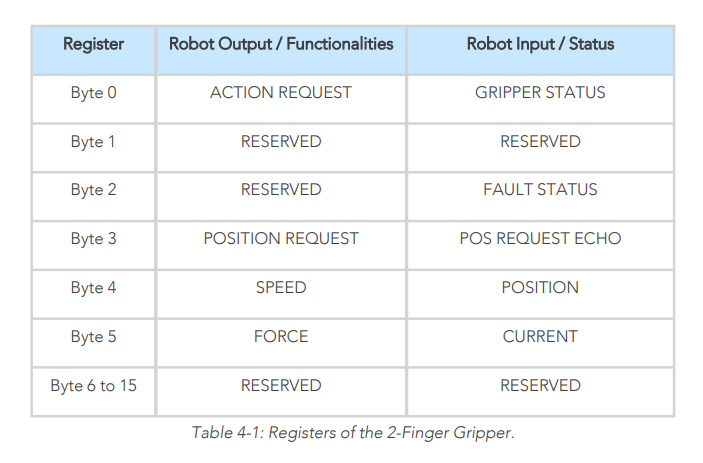
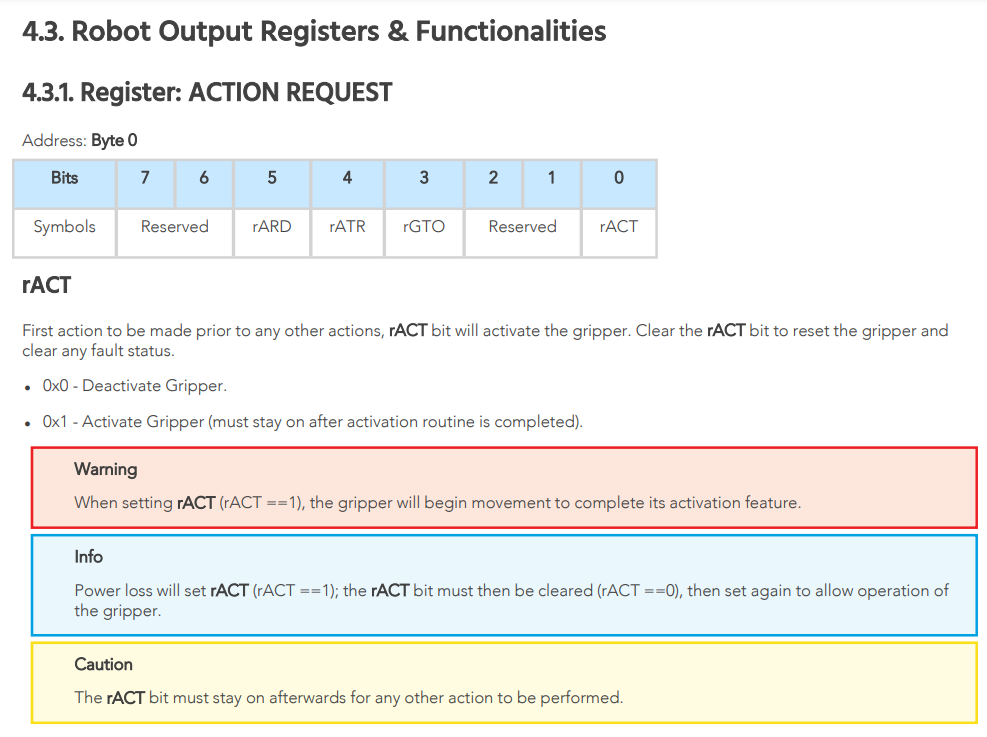
And then the details of each register. You have some output functions to control the gripper and also some input functions to receive some information about the gripper.
Logic Program
To control the gripper using registers:
-
Activate the Gripper
-
Write activation value to the appropriate output register.
-
-
Send a Position Command
-
Set desired position, speed, and force.
-
-
Read Feedback
-
Monitor input registers for object detection and motion status.
-
The programmation is not supported by Robotiq but you have all the information needed on the documentation.
You will find the control logic example to respect for your programmation :
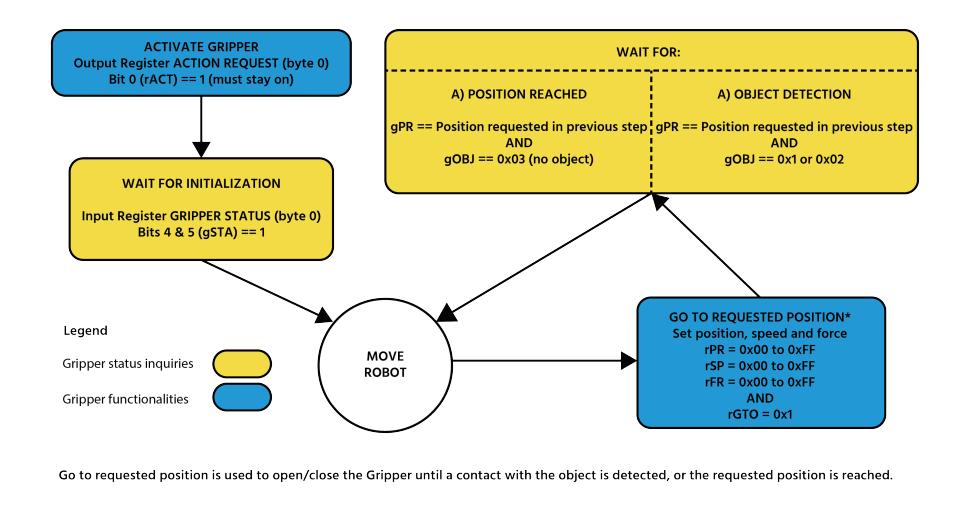
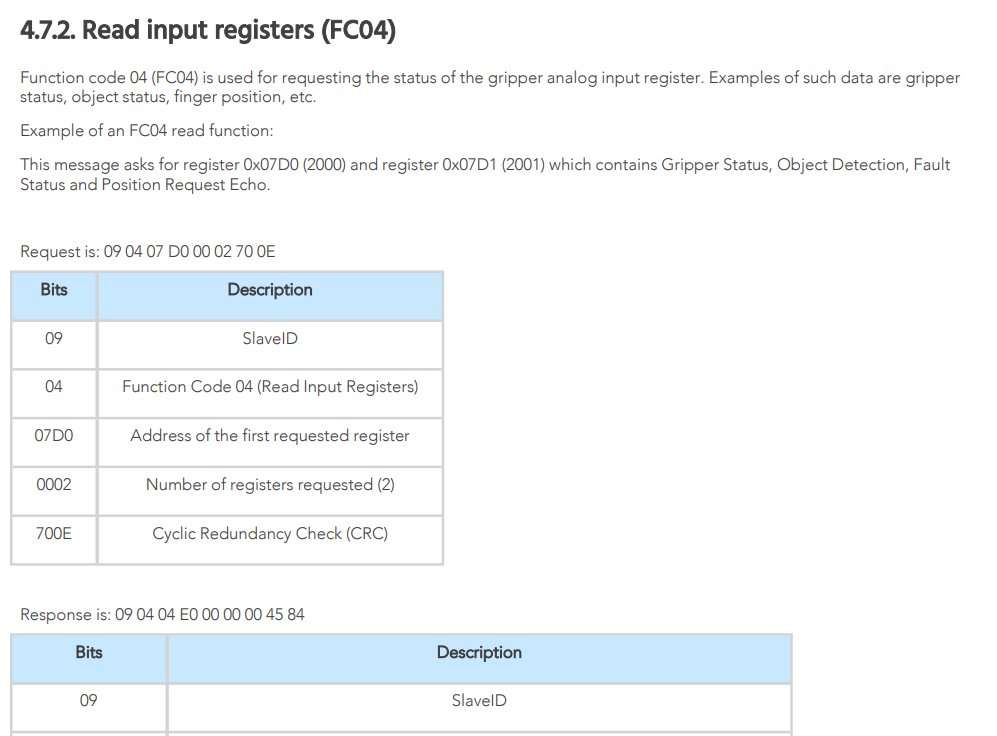
In the end, you have also some examples of how to read or write on the registers.
Conclusion
When working with non‑UR robots, controlling your gripper via registers is the recommended method. Use the Robotiq Universal Controller if your robot does not support Modbus RTU directly. For full register documentation, wiring instructions, and example code, visit Robotiq Support.