Context
If your Robotiq gripper’s fingertips don’t close completely, it usually means the gripper’s calibration is out of sync. This often happens when the gripper is activated while already in contact with a part. Correcting the calibration will restore the full range of motion.
Why This Happens
-
Activating the gripper while it is touching a part misleads the system about what the “closed” position is.
-
As a result, the gripper stops early and does not display its full stroke.
Step-by-Step Troubleshooting
1. Confirm Activation Conditions
-
Make sure the gripper is not holding or touching any object when you activate it.
2. Calibrate the Gripper
For e-Series robots:
-
On the teach pendant, tap Installation.
-
In the left menu, select URCaps.
-
Tap the Gripper button.
For CB-Series robots:
-
On the teach pendant, go to the Installation tab.
-
In the left menu, select Gripper.
Then, for both robot series:
-
Tap the Calibration tab.
-
Tap Calibrate for your gripper.
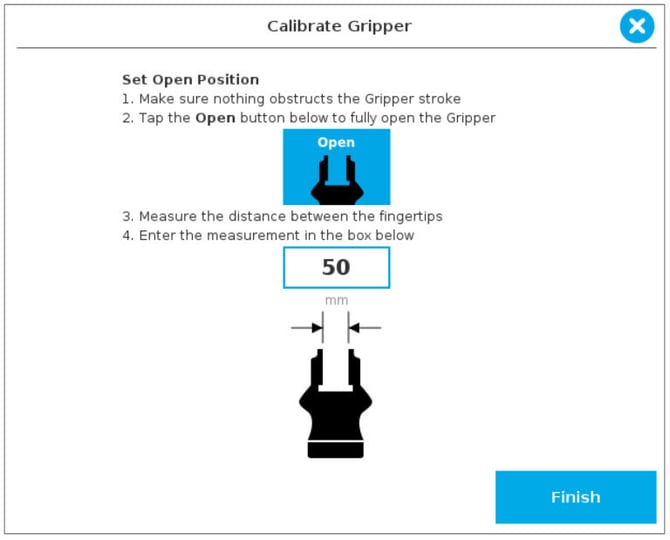
-
Follow the on-screen Calibration wizard instructions.


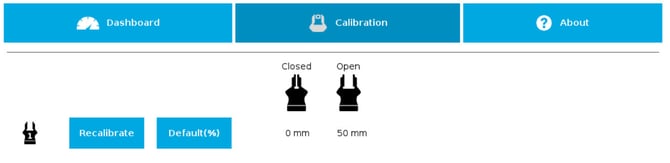
3. Verify Results
-
After calibration, the gripper should correctly show its fully open and fully closed positions.
Conclusion
When fingertips don’t close fully, the issue is almost always due to activation in contact with a part. By ensuring proper activation and recalibrating through the teach pendant, the gripper’s full range of motion is restored.