Robotiq Adaptive Grippers report position using an encoder value between 0 and 255. Users sometimes notice that the gripper never fully reaches either extreme, even when the fingers appear fully closed or open. This article explains why that happens and how to interpret these values correctly.
The Robotiq 2F-85 Adaptive Gripper is a versatile and adaptable gripper with precise control over its movements. The encoder values provided by the gripper are essential for understanding its position. This article will explain the reason behind the observed encoder values and how to interpret them.
Explanation
1. Initial Activation
During the initial activation or power-up of the Robotiq 2F-85 Adaptive Gripper, it goes through a self-calibration process. During this process, the gripper will move to its maximum mechanical opening and closing position and assign encoder counts ranging from 0 to 255. This initial calibration sets the gripper's encoder values relative to its mechanical limits.
2. Observed Encoder Values
It is normal to observe that after activation, the open and closed positions of the gripper correspond to encoder values of around 3 and 230 (rather than 0 and 255). The reason behind this observation is the mechanical design of the gripper.
3. Mechanical Design
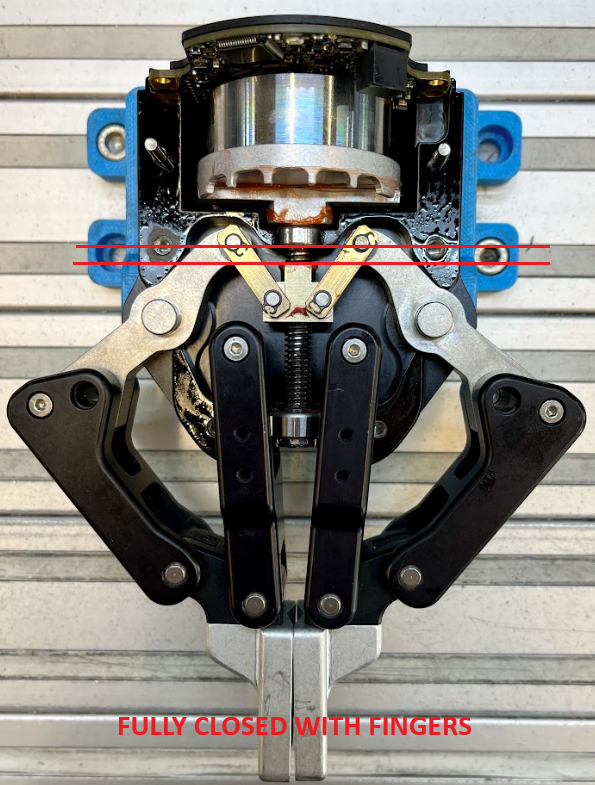
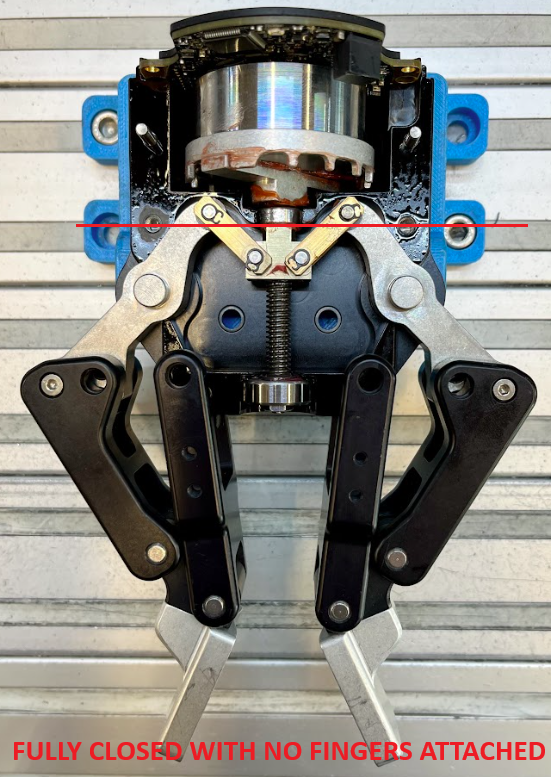
The Robotiq 2F-85 Adaptive Gripper is designed in such a way that when the fingers are fully closed and in contact with each other, they restrict the full movement of the transmission nut from reaching the two extremities of the transmission screw. This design feature ensures that the gripper operates safely and with precise control. You can see the differences in the images below:
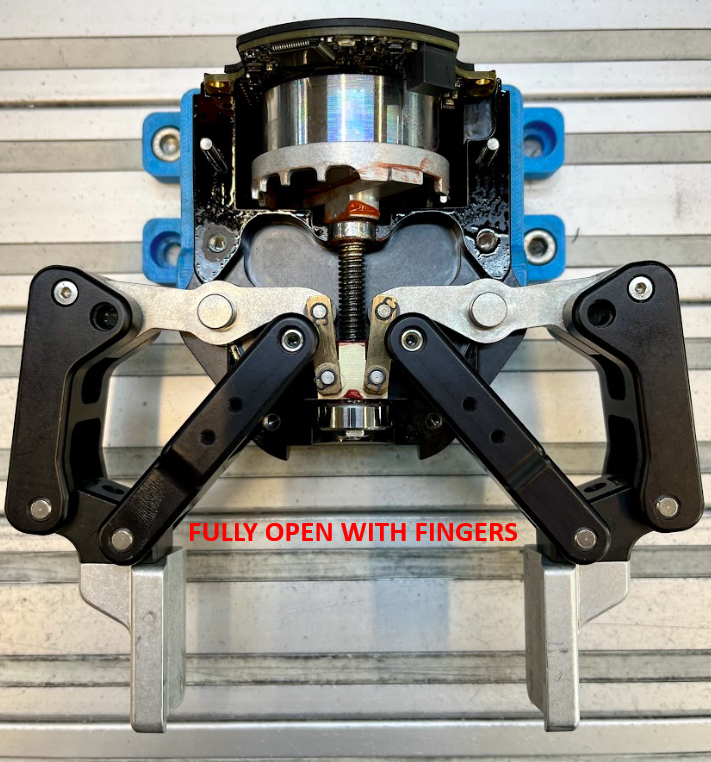
4. Using Encompassing Grip:
If you use the gripper in an encompassing grip (where the fingers are open to their maximum extent), or if you remove the fingers, you will notice that the transmission nut can travel a few additional millimeters, allowing it to reach the encoder values of 0 and 255.
Conclusion
In summary, the observed encoder values of around 3 and 230 after activation are due to the gripper's mechanical design, which restricts full movement when the fingers are closed, and this is normal behavior.
These encoder values provide accurate and consistent feedback relative to the gripper's operating range. When using the gripper in different modes or by removing the fingers, it is possible to achieve the encoder values of 0 and 255. These encoder values are crucial for the precise control and operation of the Robotiq 2F-85 Adaptive Gripper.
Need help? Contact Robotiq Support
Updated: February 2026