Context
This article explains how to manage a Multipick application where two or more sensors are required, but the URCaps interface allows the use of only one. The goal is to merge both sensor signals into a single input that can be used by the URCap.
Information
Digital Input & Output Setup

In this example:
-
Sensor 0 is connected to DI0 (Digital Input 0)
-
Sensor 1 is connected to DI1 (Digital Input 1)
The goal is to output a high signal only when both DI0 and DI1 are high. This is done using a Polyscope thread that controls a digital output.
Before copilot 3.43.0 : Polyscope Thread Code
Add a thread in your robot program with the following logic:
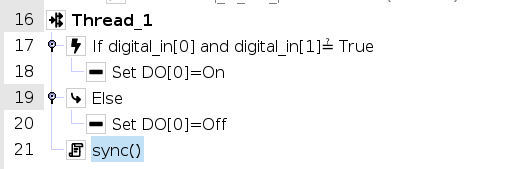

This logic activates DO0 (Digital Output 0) only when DI0 = 1 and DI1 = 1.
Electrical Connection
Physically wire DO0 to an unused input such as DI4. This makes DI4 your combined sensor signal.
URCap Configuration
In the URCap interface, configure the sensor input to use DI4 instead of DI0 or DI1. This allows you to handle both sensors through a single usable input.


Conclusion
By combining DI0 and DI1 into a single logic-controlled DO0, and linking it electrically to DI4, you can use two sensors effectively within the URCaps constraint of a single input.
For more guidance on URCap input configuration, visit the URCap Integration Guide.
Was this article helpful? Let us know!
Updated: January 2026
Need help? Contact us at https://robotiq.com/contact