Context
The Robotiq 3‑Finger (3F) Gripper offers unmatched flexibility for handling complex parts and geometries. Although TM/Omron robots don’t natively support the 3F Gripper through TMComponents, integration is still possible using Modbus TCP/IP communication. This article explains how to set up the gripper mechanically and establish a communication link with a TM/Omron robot.
1. Required Hardware
To complete the integration, you'll need the following components:
-
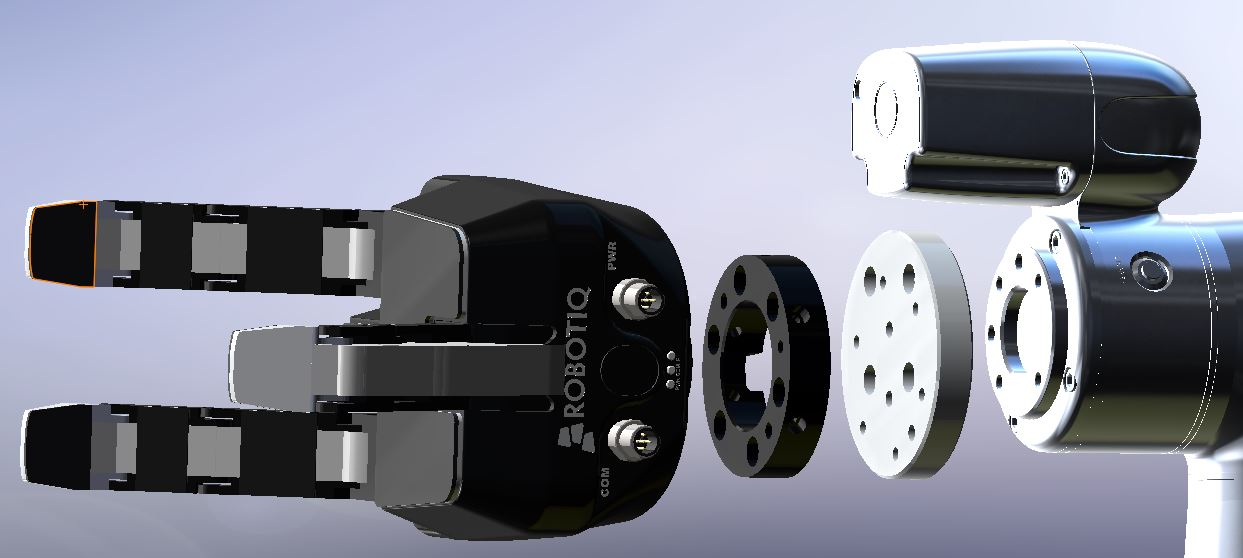
AGS‑001‑MTCP — 3‑F Gripper with Modbus TCP/IP support
-
AGS‑APL‑173 — Wrist Adapter Plate S‑173
-
AGS‑CPL‑101 — 3‑Finger Coupling S‑101
These parts ensure both mechanical and communication compatibility between the gripper and TM/Omron robot.

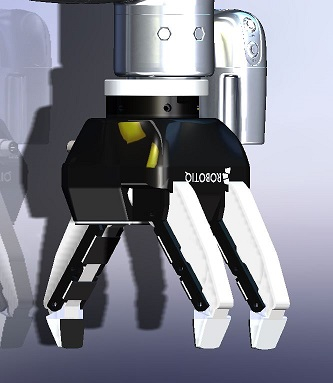
2. Mechanical Setup
Because of the gripper’s size, mounting it directly to the robot flange may cause interference with the wrist camera. To avoid collisions, you must offset the gripper using an adapter plate.
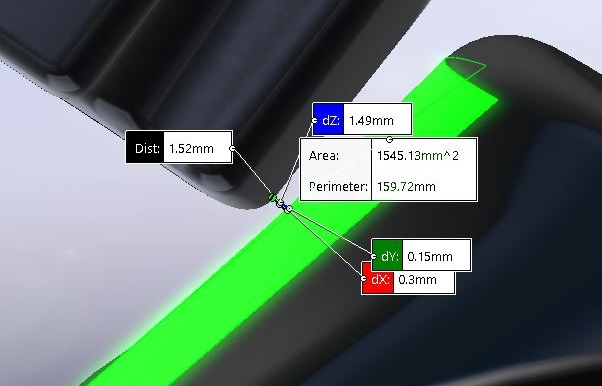
-
Use the S‑173 Adapter Plate, originally designed for UR, to provide approximately 1.52 mm of clearance.
-
Install the S‑101 Coupling to connect the gripper to the adapter plate securely.
3. Communication Setup
Please note that there are no TMComponents to use the 3-Finger Gripper with TM/Omron robots.
The 3F Gripper supports Modbus TCP/IP, which is also compatible with TM/Omron robot platforms.
Steps:
-
Connect the gripper to the robot via Ethernet.
-
Assign a static IP address on the robot to match the gripper’s communication settings.
-
Use the TM Flow interface to configure a Modbus Client that can send commands to the gripper.
-
Test basic commands like open/close and finger position control. You can use this article for that : Controlling a Gripper by using Registers
Conclusion
Even without native TMComponent support, the Robotiq 3‑Finger Gripper can be successfully integrated with TM/Omron robots using the right mechanical offset and Modbus TCP/IP communication. This setup enables you to benefit from the 3F Gripper’s advanced capabilities on TM platforms.