Context
Some palletizing applications require picking boxes from a moving conveyor. This article explains how to use Universal Robots’ conveyor tracking feature in combination with Robotiq’s Palletizer to accomplish that goal.
1.Enable Conveyor Tracking on UR
To achieve this, you will need to activate and set up the conveyor tracking on UR. Please see this article from UR for a detailed guide on how to setup the conveyor tracking feature:
https://www.universal-robots.com/articles/ur/application-installation/conveyor-tracking-with-wizard/
2.Simulate an Always-On Box Sensor
The the box sensor signal input for the palletizer node must always be on, which can be achieved by :
- wiring a cable from a 24v output and inserting it in an input of the robot that will act as the box sensor.
- Using palletizer node setting checkbox :

Once this is done, you can move on to the next steps.
3.Configure the Palletizer Node
Inside the palletizer node, you will need to record the PrePick position and insert a wait command that waits for the real box sensor signal. Here's what the program looks like:
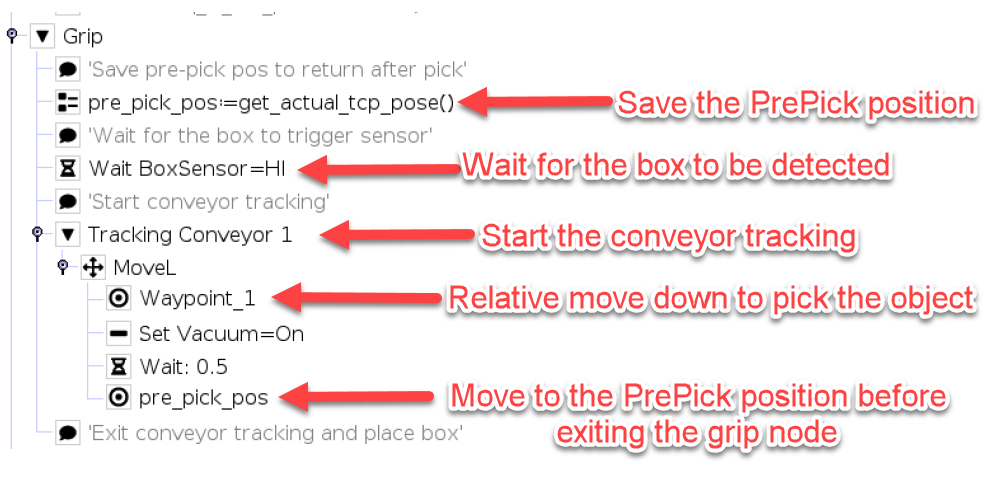
4.Position the Box and Define the Pick Pose
Place the box on the conveyor and move it toward the box sensor, just enough to trigger it. Then define the pick position above the box so that the robot does not touch it. In our example, we define the pick pose about 50mm (2 inches) above the box.
Next, in the grip node, enter a wait until the input where the real box sensor is high.
5.Relative move
Then do a relative move to pick the object, start the vacuum and raise back to the previous position.
By doing this, the robot will move to the "fake" pick position above the box, and once the sensor is triggered, the robot will pick the box while the conveyor is moving and then lift it back to the pre-pick pose.
Note: The PrePick pose will track along with the conveyor during execution.
Conclusion:
By combining UR’s conveyor tracking with proper logic inside the Palletizer and Grip nodes, the robot can successfully pick items from a moving conveyor.
Download the program and video example to see it in action.