Context
If either the position of the visual tag or the robot has shifted since teaching, your program’s waypoints based on the Visual Offset node may become inaccurate. To ensure reliability, you need to redefine the reference tag position before adding or editing waypoints.
Information
1. Redefine the Tag’s Position
-
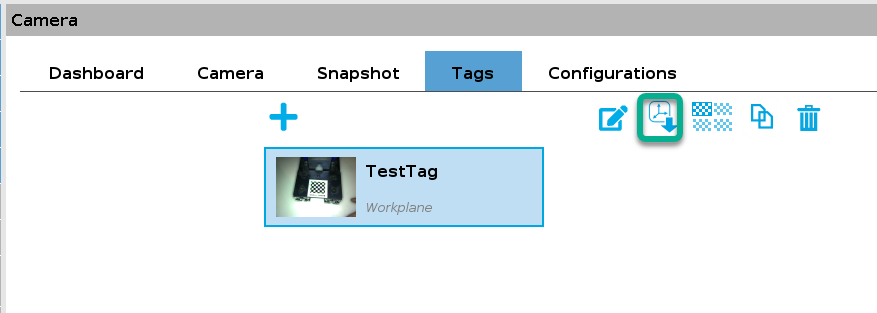
Open the Installation tab.
-
Navigate to URCaps → Camera → Tags.
-
Select the relevant visual tag and click the snapshot redraw/edit icon.
-
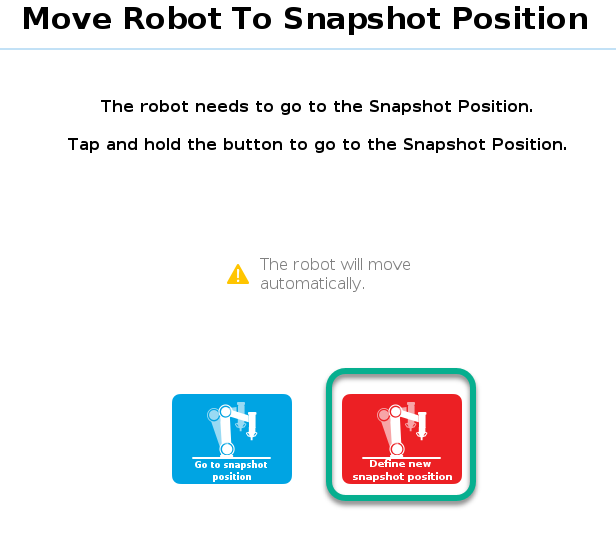
If necessary, select Define New Snapshot Position—especially if the robot or tag has moved significantly.
robotiq.zendesk.com -
Capture both far and close snapshot positions and save them to update the reference location.
Add or Edit Waypoints
Once the visual tag reference has been updated and saved:
-
All new waypoints will be correctly positioned relative to the current tag location.
-
You can now safely modify existing waypoints or add new ones based on the updated reference.