

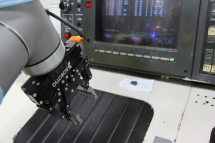
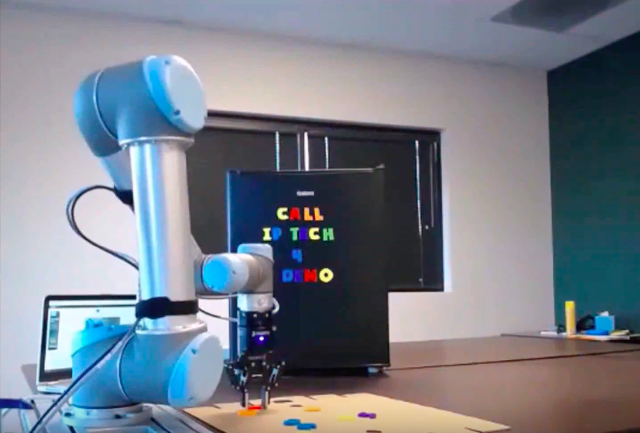
With the release of our new 2-Finger 85 Adaptive Gripper we have noticed an increased interest by end-users for machine tending. In fact, we have seen several applications of our Gripper paired with a Universal Robots used in the loading and un-loading of CNC machines. Why is the Robotiq Gripper currently so popular for this application? Here's a list of 6 advantages to consider which will answer this question.
1. Wide Programmable Stroke
 One of the main advantages of Robotiq Grippers is that they can grasp a very wide variety of objects. In fact, the 2-Finger 85 Adaptive Gripper can grasp objects with any geometry within the 0 to 85 mm range. With the use of the encompassing mode, this Gripper can also grasp cylinders from 43 to 85 mm wide. So with a single Gripper, you can grasp a wide range of geometries and dimensions. This means that a high mix of parts can be machined using the same Gripper for machine tending applications.
One of the main advantages of Robotiq Grippers is that they can grasp a very wide variety of objects. In fact, the 2-Finger 85 Adaptive Gripper can grasp objects with any geometry within the 0 to 85 mm range. With the use of the encompassing mode, this Gripper can also grasp cylinders from 43 to 85 mm wide. So with a single Gripper, you can grasp a wide range of geometries and dimensions. This means that a high mix of parts can be machined using the same Gripper for machine tending applications.
Since the stroke is programmable, it can be optimized to reduce cycle time. For example, if an object is 25mm wide, it is possible to open the Gripper to 30 mm to grab hold of the object. This means that the Gripper only has to perform a 5 mm stroke instead of a 60mm stroke during the grasping operation. And the same thing occurs once the object is released. These specifications mean that a couple of seconds are saved by each pick and place operation which at the end of the day will result in a reduction of cycle time.
2. Built in Feedback
The 2-Finger 85 Gripper has a built-in object detection device. So the Gripper can send a message of ''YES, I have the part'' or SHOUT, "NO, We just missed it''. Seriously, the Gripper can detect the presence of a part and by knowing the approximate position of where it should be for any given part, the Gripper knows if the part has been grasped or not. Thanks to motor encoders, the Gripper can determine if an object is grasped with a resolution of less than 0.3mm. However, it was not designed to measure parts.
During the motion from the pick layout to the CNC machine, the Gripper can detect if the part has been dropped. In fact, because coolants from the machining process are often transferred to the finished part, these parts can be slippery and this is why this feature has been incorporated into our Grippers. For example if a part is dropped, the Gripper can detect this and can give feedback to the robot. Either the robot can try to pick another part or it can literally stop.
3. Self-Adaptation
The cool thing about the Gripper is that there is no need to know the geometry of the part you will pick. In fact, since the Gripper is force limited, you can set a certain force and close the Gripper on the object. Whatever the size or shape of the parts, the Gripper will adapt its fingers to it. Regardless of whether it is round, square, jagged, uneven, etc.
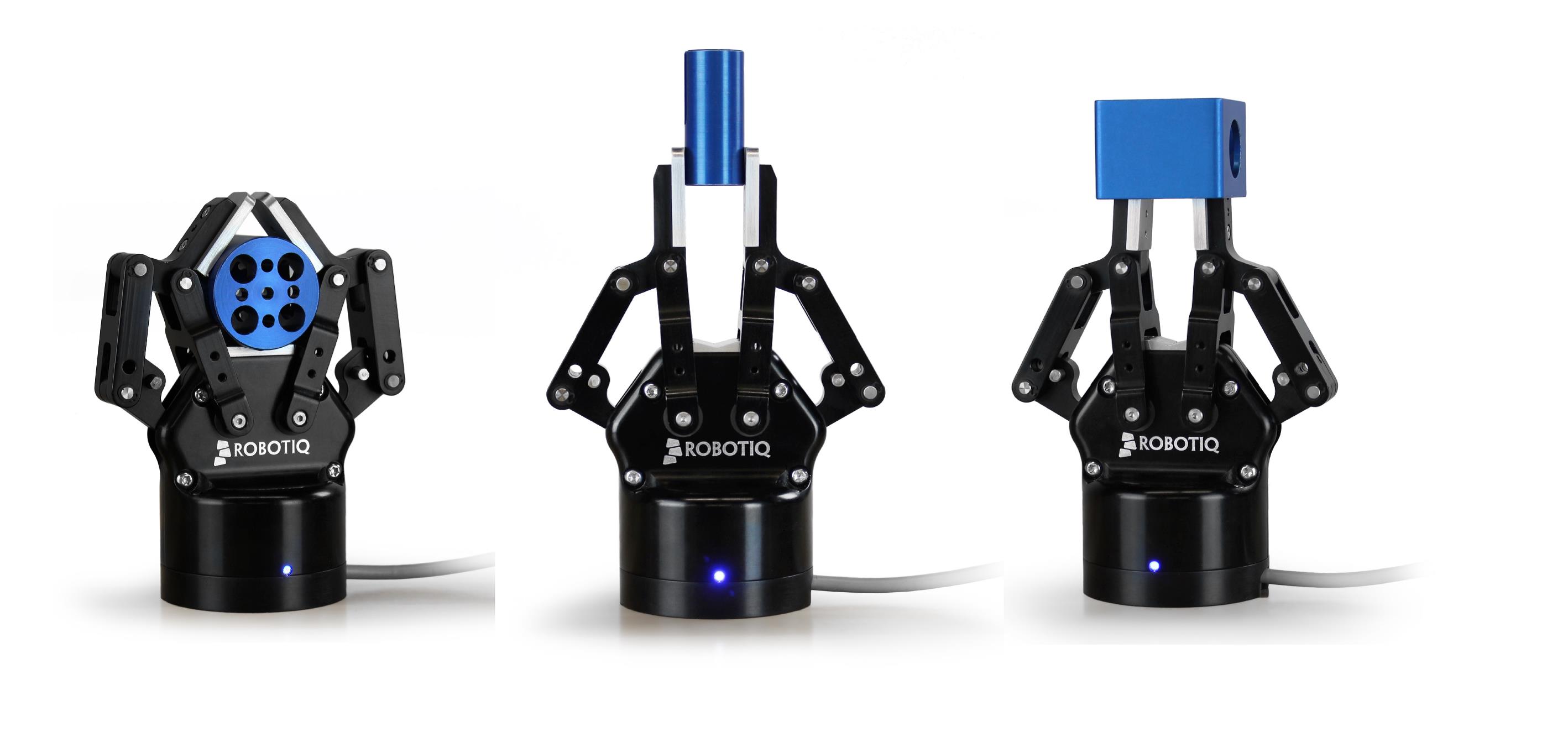
The Gripper can also grasp an object via its internal diameters. Note that the force applied on the outside diameters (O.D.) is the same amount of force that can be applied on the internal diameters (I.D.). So the Gripper is efficient in both directions.
4. Easy to Modify Fingertips
 We have noticed that machine tending operations sometimes use custom fingertips on our Grippers. Since a robot is usually paired with a machine that accomplishes a particular task or set of tasks on a certain part or a certain group of parts, fingertips can be adapted to perfectly fit these parts. The Gripper can be provided with flat aluminum fingertips or silicone covered ones. Because many applications are unique, we have many different fingertips that can be adapted to many different types of applications, ask our sale representatives about the options available.
We have noticed that machine tending operations sometimes use custom fingertips on our Grippers. Since a robot is usually paired with a machine that accomplishes a particular task or set of tasks on a certain part or a certain group of parts, fingertips can be adapted to perfectly fit these parts. The Gripper can be provided with flat aluminum fingertips or silicone covered ones. Because many applications are unique, we have many different fingertips that can be adapted to many different types of applications, ask our sale representatives about the options available.
Sometimes when a custom fingertip is mounted on our Gripper, the design is done by the user inhouse. In order to facilitate this process we provide all the technical data needed to produce your own custom fingertips. See our instruction manual for more information.
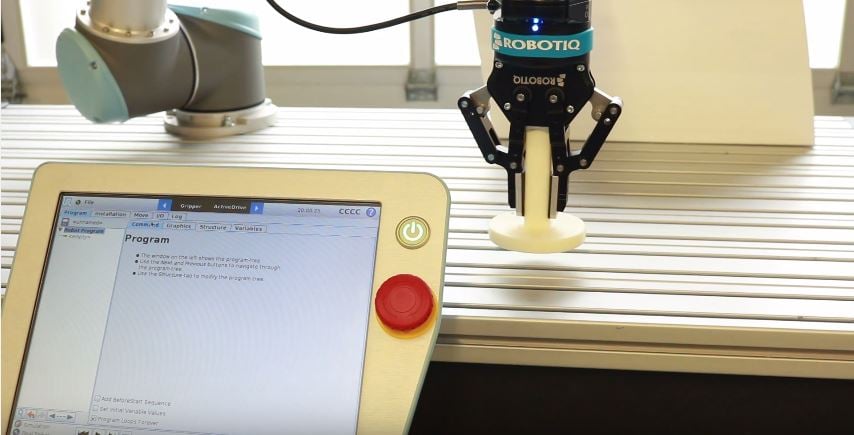
5. Simple Control
Since most of the companies that are doing machine tending with our Grippers are not specialized robotic companies, we have made a conscious decision to try to reduce their programming time and efforts. So we offer software with easy installation and simplified commands for control methods, so that the Gripper is easy to use for everyone. As I said, the Gripper doesn't need to know what the geometry of the part is, a simple ''go to'' command can be sent to the robot to close its finger around the object. The Gripper is also force limited which means it can't damage a part if the force is correctly set. To simplify the robot cycle, instead of waiting to make sure the robot has grasped the part, the Robotiq Gripper has built-in object-detection which can give direct feedback to the robot program. If the part is grasped, the robot is now sure that everything is fine and that it can continue in its path.
6. Bonus
The 2-Finger 85 Adaptive Gripper is well adapted to CNC operations, in fact, since there are a lot of fragile parts that come out of CNC machines, you want to be relatively careful with them. With the possibility to adjust the force of the Gripper, it is really easy to grasp parts without damaging thin walls or delicate structures, for example.
Robotiq also provides a software package especially for machine tending operations. We have built kits for Fanuc and Universal Robots. These kits makes the installation on the robot easier and the integration of routines as simple as 1-2-3.
The base line is to provide to end-users all the tools necessary to do machine tending easily. Since introducing robots to a workshop can be complicated on many different levels, we really want to reduce the setup time and provide flexible cells that are easy to work with. Our Grippers are designed to be easy to use on a wide variety of parts, with all their specifications, they are the right Grippers for machine tending applications.
Related Articles
How to Control the 2-Finger Adaptive Gripper
How to install the 2-Finger 85 Adaptive Gripper on Universal Robots




Leave a comment