
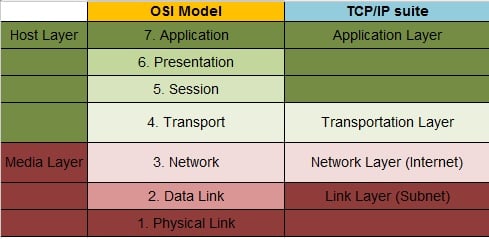
Communications Protocol Structures & Models
Communication protocols describe the set of rules to be used in communication exchange; each one having its own syntax,...


Robotic Tool Changers: Top 5 Problems
Robotic tool changers are used on robots to change end effectors so one robot can do multiple tasks. It can enable switching...
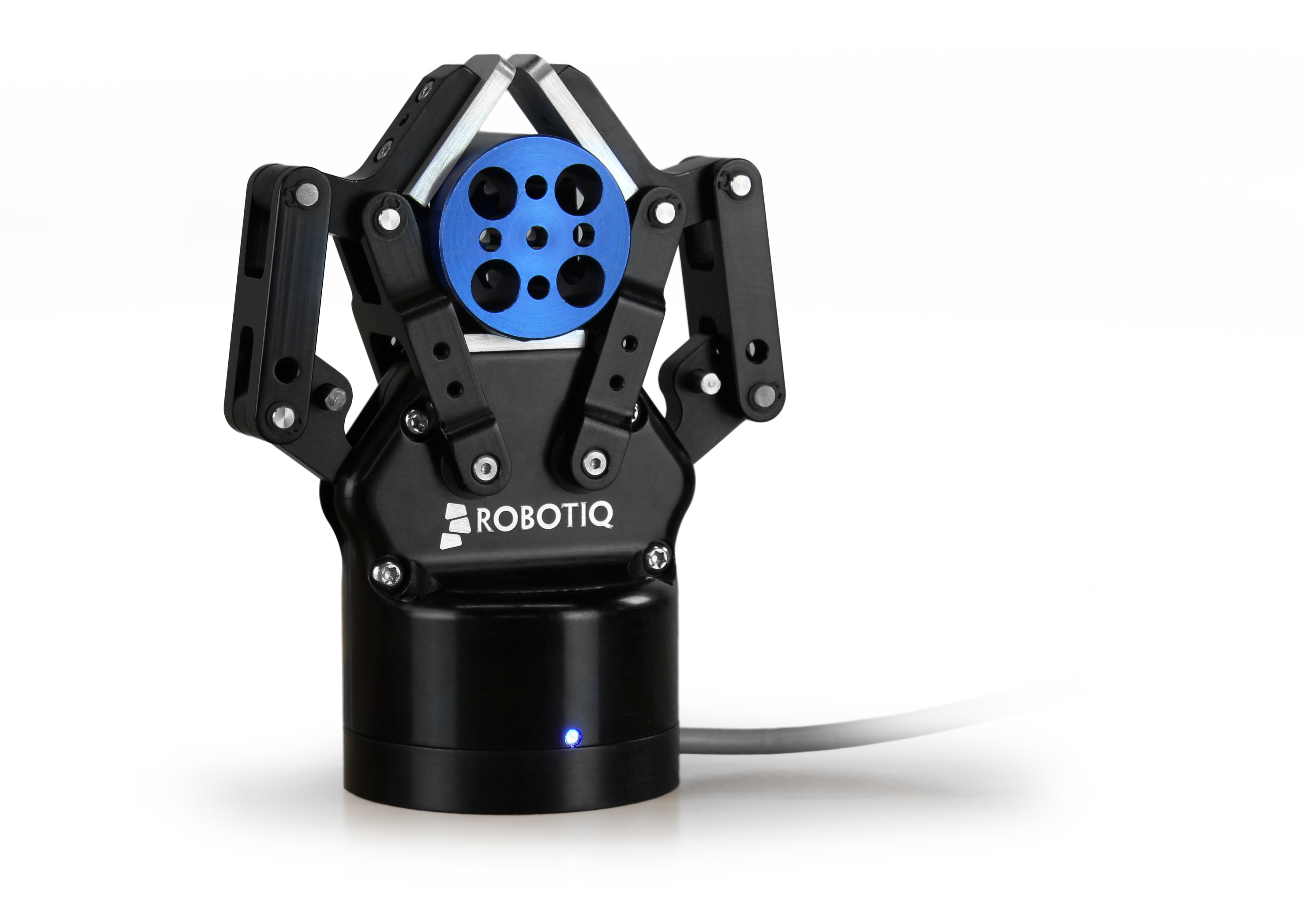
Servo-Electric Gripper: How Does It Work
This article presents an overview on how a servo-electric gripper works. The image below shows the main components of an ...
ROS-Industrial: open-source software in industrial robotics
A couple years ago Southwest Research Institute (SwRI) released an open-source software package which brings industrial...


How to Verify Gripper Contact
Both of our Adaptive Grippers are able to grip objects of various shapes using their innovative finger mechanism. This allows...
Using Feedback from the 2-Finger Adaptive Robot Gripper
This article explores how feedback from the 2-Finger Adaptive Gripper might be used in industrial applications.

How to Control the 2-Finger Adaptive Robot Gripper?
As explained in a previous article, the 2-Finger Adaptive Robot Gripper is able to achieve both pinching and encompassing...
Robot Force Control: An Introduction
Today's industrial robots are almost always programmed using a position control scheme. Typically, the robot tool follows a...
Leave a comment