Simulationsdatenblatt für den adaptiven 3-Finger-Robotergreifer
ERFASSEN SIE ALLE DATEN FÜR DIE ERSTELLUNG EINER SIMULATION MIT DEM ADAPTIVEN 3-FINGER-ROBOTERGREIFER
Dieses Dokument liefert Formblätter, Abbildungen und Daten, die Ihnen bei der Erstellung präziser Simulationen für den adaptiven 3-Finger-Robotergreifer von Robotiq helfen sollen. Diese Informationen wurden entweder experimentell gemessen oder direkt von CADs erfasst.
Das Dokument enthält Daten bezüglich::
-
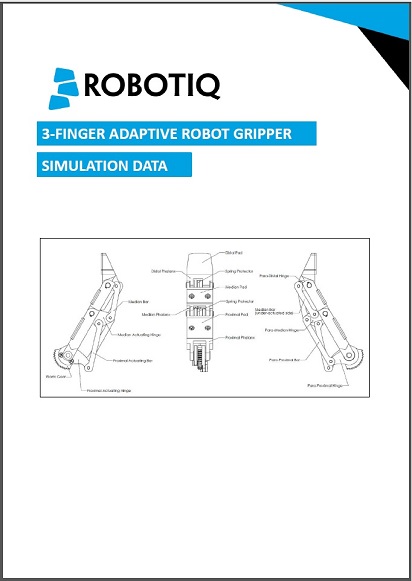
FINGERGEOMETRIE,
-
KOORDINATENSYSTEM,
-
FINGER-NOMENKLATUR,
-
POSITIONS-NOMENKLATUR,
-
HD PARAMETER,
-
FEDERDATEN,
- MOTORDATEN,
-
GETRIEBEDATEN,
-
KRAFTDATEN.